RCOS Elevation over Azimuth (EL/AZ) Gimbal Mounts
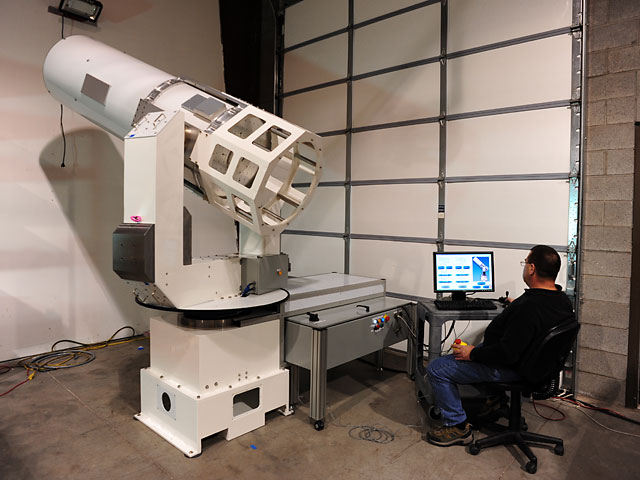
RCOS Elevation over Azimuth (EL/AZ) Gimbal Mount.
Autonomous Open Loop Low Earth Orbit (LEO) Satellite and Orbital Debris Tracking ( See our paper presented at AMOS 2007 ) using an RCOS 20RC and EL / AZ Gimbal.
|
NORAD 23483
Track Date: May 1, 2007
SL-19 DEB
SATELLITE DEBRIS
Launch date: 1994-12-26
Commonwealth of Independent States (former USSR)
|
NORAD 01359
Track Date: June 4, 2007
TITAN 3A TRANSTAGE R/B
ROCKET BODY
Launch date: 1965-05-06
United States of America
(US)
|
NORAD 21221
Track Date: June 4, 2007
SL-12 R/B (2)
ROCKET BODY
Launch date: 1991-04-04
Commonwealth of Independent States (former USSR)
|
|
NORAD 18214
Track Date: June 10, 2007
COSMOS 1869
OKEAN SATELLITE
Launch date: 1987-07-16
Commonwealth of Independent States (former USSR)
|
NORAD 29671
Track Date: June 10, 2007
COSMOS 2426
GLONASS-M NAV SATELLITE
Launch date: 2006-12-25
Commonwealth of Independent States (former USSR)
|
NORAD 21938
Track Date: June 10, 2007
SL-8 R/B
ROCKET BODY
Launch date: 1992-04-15
Commonwealth of Independent States (former USSR)
|
Autonomous Low Earth Orbit (LEO) Satellite and Orbital Debris Tracking using Optical Trackers and High Speed Imaging Systems.
Brad Ehrhorn – RC Optical Systems, Inc.
Dan Azari – Telescope Controls, LLC.
April 2007 - RC Optical Systems, Inc. and Telescope Control Systems, LLC., have been developing an autonomous LEO tracker that allows for unattended acquisition and imaging of LEOs using low cost COTS equipment. The test setup from which we are gathering data consists of an RCOS Elevation over Azimuth (EL/AZ) Gimbal, RCOS 20 inch f/8 Ritchey-Chrétien and Telescope Controls motion control system.
Central to success of LEO acquisition and open loop tracking is accurate modeling of Gimbal and Telescope misalignments and flexures. Using Pro-TPoint and a simple automated mapping routine, we have modeled our 20RC to achieve pointing and tracking accuracies within a population standard deviation of 1.4 arc-sec. Once modeled, an RCOS Gimbal Tracking System can easily and quickly be calibrated to the sky using a simple 6-10 star map to solve for axis tilt and collimation coefficients.
Acquisition of LEO satellites is accomplished through the use of a wide field imager. Satellite identification is accomplished by detecting a stationary centroid against a background of moving stars in two consecutive images using a standard aperture photometric flux algorithm. Using a COTS CCD camera, exposure times of 50-100ms is adequate for most LEO satellites. If satellite detection fails, the sky is searched first by varying epoch within +/- 5 seconds, and then by epoch and inclination. We have found this technique successful in the majority of cases. Once the satellite has been detected, centering within the tracking and imaging arrays is accomplished through solving a best fit of epoch and inclination offsets against the ephemeris data. Active tracking is available at this time if desired.
Elevation:
- Designed, Engineered and Modeled using SolidWorks 2007.
- 100% CNC machined.
- Fabricated, welded, then annealed 6061 aluminum.
- Final machining is done *after* annealing.
- 34 inch span between fork arms.
- 32.5 inch "swing through" clearance from center of rotation.
- Bearing axis is line bored after final assembly.
- Byer's 15 inch Research Grade Worm/Gear.
- *Optional High Torque Direct Drive Servo.
Azimuth:
- Designed, Engineered and Modeled using SolidWorks 2007.
- 100% CNC Machined.
- Payload Capacity - 1000+ pounds.
- Major Axis Bearing - 16 inch O.D.
- Fabricated 7075 aluminum.
- Byer's 20 inch Research Grade Worm/Gear.
- *Optional High Torque Direct Drive Servo.
Field Rotation:
- Optional RCOS Large Format Field De-Rotator.
Control System by Telescope Controls, LLC.:
- Brushless DC-servo motors. High power 6600 watt drive amplifiers.
- Optional linear amplifiers for High Torque Direct Drive.
- Maximum slew speed of 17 degrees per second in azimuth and 20 degrees per second in elevation.
- *Optional slew speeds > 80 degrees per second in both azimuth and elevation with High Torque Direct Drive.
- Sophisticated dual-loop servo control on each axis. Ultra high precision axis encoders (resolutions <0.002 arc-sec) eliminate ALL drive and gear errors. True zero periodic error and backlash on all axis.
- Field upgradeable flash RAM permits easy software updates.
- Unlimited selection of tracking and slew rate control.
- Optional Sophisticated trajectory profiler guarantees accurate positions and velocities per 1 ms time slice.
- Optional satellite trajectory profiler.
- Built-in home sensor circuitry on each axis ensure that the mount always knows its orientation (after a one-time initialization), even after power failure (repeatability < 0.02 arc-sec).
- Software controlled "hard limits" prevent the mount from tracking or slewing into itself.
- User-defined parameters can be stored to onboard flash RAM.
- Numerous safety features critical to remote operation including current-limit protection, encoder-error limits, acceleration ramping, and user-definable maximum slew speeds.
- Joystick or PC software control. Compatible with third party guiding systems.
- Control system can track at true lunar, solar, minor planet or comet, NEO or LEO satellite rates, or at almost any user-defined rate or trajectory.
- Compatible with any ASCOM compatible planetary program. Drivers for non-Windows operation systems available upon request.
- Accurate continuous correction of refraction in both pointing and tracking.
- Embedded mechanical modeling correction provides extremely accurate pointing and tracking.
- Optional differential modeling of multiple telescopes and/or lens guarantee accurate bore site is maintained despite differential flexure.
* Denotes options available with High Torque Direct Drive Servo.
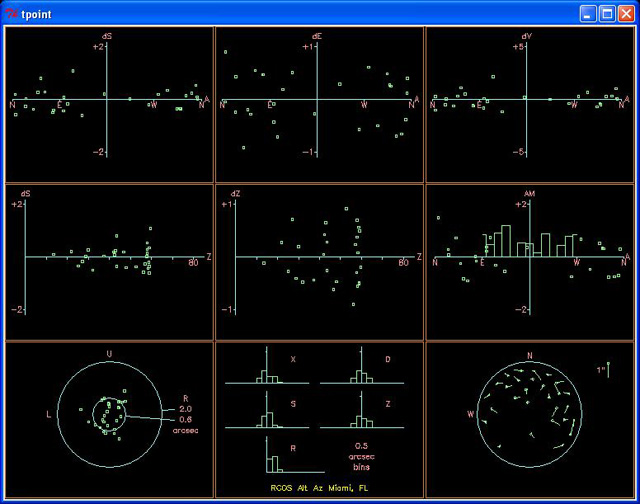
Sky RMS = 1.07
Popn SD = 1.31
T-Point Pro is licensed to RCOS by Patrick Wallace
|
| PRICE: Call |